Již několik let jsou na trhu dostupné GNSS přijímače umožňující dosáhnout centimetrové přesnosti lokalizace. Tyto přístroje se z počátku prosazovaly převážně při geodetických měřeních, kde významně časově zkracovaly celkovou dobu realizace zakázky ve srovnání s tradičními přístupy. Tyto přístroje jsou dnes také běžně dostupné i v OEM verzích, tedy verzích primárně určených pro zástavbu do vlastních vyvíjených zařízení.
Dosažení vyšších přesností než je běžné u denně používaných přístrojů (mobilní telefon, navigace pro automobily atd.) je velmi často založeno na využití dalších korekčních dat, které nejsou součástí základních GNSS signálů. Standardní způsob měření (v režimu tzv. kódového měření) je možné těmito přístupy zpřesnit přibližně až na 30 cm. Pro dosažení ještě vyšších přesností (blížících se k 1 cm) je nutné použít přístroje s tzv. fázovým měřením. Výpočet požadovaných veličin je možný v reálném čase nebo později v rámci tzv. post-processingu.
Za ideálních pracovních podmínek nemusí být pro mnoho aplikací užitné parametry cenově řádově rozdílných přijímačů významně rozdílné. Stále ale existuje nespočet aplikací, kde klíčovým požadavkem je stabilní vysoká přesnost v průběhu celého měření i v případě zhoršených pracovních podmínek, nejčastěji způsobených sníženou kvalitou přijímaných GNSS signálů.
Přesné letecké mapování
GNSS přijímače dnes zaujímají nenahraditelnou roli u létajících robotů neboli bezpilotních letadel. V podstatě každé bezpilotní letadlo určené pro profesionální použití, dokonce i řada amatérských, je dnes vybaveno GNSS přijímačem pro zajištění poziční stabilizace, případně pro lokalizaci při automatickém letu po naplánované trajektorii. V tomto případě, až na specifické případy, postačují autonomní přijímače pracující pouze v kódovém režimu s přesností v řádu jednotek metrů. Své uplatnění zde ovšem nacházejí i řádově přesnější a dražší RTK GNSS přijímače, a to především za účelem přesného leteckého mapování – rychle se rozvíjející odvětví nacházející uplatnění v řadě oborů, jako je stavebnictví, zemědělství, životní prostředí či archeologie.
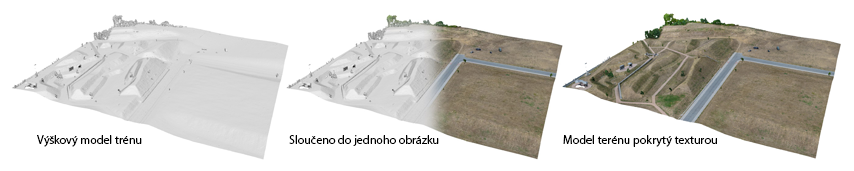
Bezpilotním leteckým mapováním se zabývá i skupina robotiky ve výzkumném centru CEITEC, které je součástí Vysokého učení technického v Brně. Samotné letadlo, typicky multikoptéra, je vybaveno dvouvstupovým RTK GNSS přijímačem od společnosti Trimble umožňujícím měřit kromě přesné pozice také orientaci ve dvou osách. Tato data jsou dále fúzována s daty z inerciálních snímačů, díky čemuž je možné estimovat všech šest stupňů volnosti s frekvencí v řádu stovek hertzů. Pomocí přesné časové synchronizace s palubním digitálním fotoaparátem je pak možné každé fotografii přiřadit přesnou pozici a orientaci v okamžiku jejího pořízení. Následné zpracování dat metodou zvanou fotogrammetrie umožňuje rekonstruovat tvar nasnímaného povrchu a vytvořit digitální 3D model a ortofotomapu s přesností a rozlišením v řádu jednotek centimetrů. Tyto mapy jsou dále používány pro přesnou navigaci autonomních pozemních robotů, které jsou na tomto pracovišti rovněž vyvíjeny.
Vysoké učení technické v Brně
Středoevropský technologický institut
Purkyňova 123
612 00 Brno